
|
|
|
Главная » Микропроцессорное управление 1 ... 9 10 11 12 13 14 15 ... 27 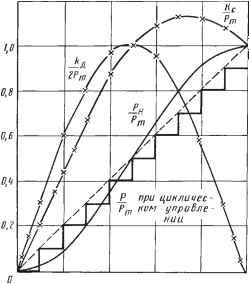 ВЛ 0,it 0,6 0,8 Ц^х Рис. 2.45. Зависимость мощности в нагрузке, статического и динамического коэффициентов передачи от относительного значения входного сигнала усилителя мощности изменяются от нуля (при }л = 0) до следующих значений: к^ = 2Р^, /с,= 1 (при ц = 0,5) и к^ = 0 и к^-=Р„ (при i=l). Зависимость значений статического и динамического коэффициентов передачи от уровня усиливаемого сигнала - одно из важнейших следствий нелинейности характеристики усилителя мощности со встречно-параллельным включением тиристоров. Возмущения, вносимые изменением сопротивления нагрузки и напряжения сети, как следует из уравнений (2.13) и (2.14), приводят к изменениям коэффициентов передачи усилителя мощности. Изменение тепловых потерь ведет к изменению статической характеристики объекта, а это, в свою очередь, означает изменение коэффициента передачи объекта. Вариация коэффициента может привести к ухудшению динамических свойств системы и даже к нарушению устойчивости. Линейную характеристику усилителя мощности Р„=/гКзад можно получить за счет сигнала обратной связи, пропорционального мощности, выделяемой в нагрузке. На рис. 2.46 представлена структурная схема блока управления тиристорами усилителя мощности нагревателей реактора диффузионного оборудования, а на рис. 2.47-диаграммы изменения напряжения в контрольных точках КТ1...КТ6 блока управления. Ток в нагрузке ч ВВщ. 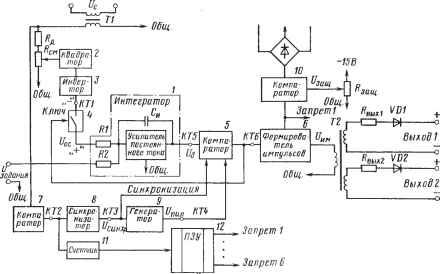 Рис. 2.46. Структурная схема блока управления тиристорами Принцип работы блока управления основан на сравнении сигнала задания активной могцности в нагрузке с сигналом, пропорциональным выделяемой активной мощности в нагрузке. Активная мощность в нагрузке при фазовом регулировании за полпериода может быть описана следующим выражением: Т/2-а Т/2-а где V, - амплитудное значение напряжения сети; kj - коэффициент пропорциональности, учитывающий сопротивление нагрузки. Сформировать электрический сигнал, пропорциональный активной мощности в нагрузке, можно за счет возведения в квадрат сигнала, пропорционального напряжению сети, и преобразования этого сигнала в соответствии с углом проводимости тиристоров, а затем его интегрирования. Как показано на рис. 2.46, на интегратор 7 через ключ 4 поступает напряжение сети V, преобразованное квадратором 2 и инвертированное инвертором 3. Управление ключом 4 производится напряжением Voo с выхода компаратора 5. На вход компаратора 5 поступает напряжение (КТ5), которое сравнивается с выходным пилообразным напряже- 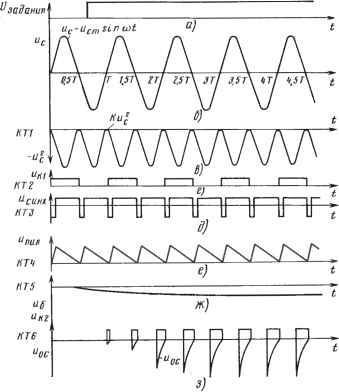 Выход 1 Выход Z К к Рис. 2.47. Диаграмма изменений напряжений на нагрузке и в контрольных точках блока управления тиристорами; а-напряжение задания; б напряжение сети; в - инвертироваииое напряжение после квадратора КТ1; г- напряжение в КТ2; д-напряжение в КТЗ; е -пилообразный импульс напряжения; ж- напряжение после интегратора; з - иапряжепие в КГ6; и-напряжение на выходе блока управления тиристорами; к - напряжение на нагрузке нием генератора 9 на его падающей ветви. При положительных значениях напряжения синхронизащ1И Кси„хр (КТЗ) и > Кпил на выходе компаратора 5 (КТ6) появляется сигнал, который посту-116 пает на формирователь импульсов 6 и ключ 4. Формирователь импульсов 6 генерирует сигналы F , которые через разделительный трансформатор Т2 поступают на управляюгцие электроды тиристоров. В зависимости от момента, при котором в компараторе 5 наступает равенство и V , происходит генерация управляющих импульсов, т. е. обеспечивается фазовое регулирование. Напряжение, поступающее на ключ 4, замыкает его на время, в течение которого тиристоры открыты. Изменение сигнала на выходе интегратора {КТ5) прекращается при равенстве сигналов Узац н Foe, при ЭТОМ бго значениб будет пропорционально активной мощности в нагрузке. Таким образом, блок управления тиристорами обеспечивает открытие тиристоров на такой угол р, при котором в активной нагрузке выделяется мощность, равная заданной. За счет обратной связи по току в нагрузке в блоке управления организуется защита по току, уровень срабатывания которой регулируется потенциометром К^щ. Сигнал, пропорциональный току в нагрузке, поступает на компаратор 70 и в случае превышения напряжения Fзaщ запирает формирователь импульсов, что приводит к запрещению подачи импульсов на управляющие электроды тиристоров. Счетчик и и схема 12, выполненная на ПЗУ, позволяют разделить каналы блока при работе на различные нагреватели реактора диффузионной печи. Одним из существенных недостатков фазового метода управления следует считать сравнительно высокий уровень высокочастотных помех, генерируемых во внешние цепи при коммутации нагрузки. Циклический метод управления обеспечивает линейную функцию преобразования и при его реализации практически отсутствуют высокочастотные помехи, так как коммутация нагрузки осуществляется в момент равенства нулю тока нагрузки. На рис. 2.42, б представлены кривые изменения напряжения на нагрузке при циклических методах управления. При этом методе изменение мощности в нагрузке осуществляется путем изменения числа периодов сетевого напряжения - в цикле регулирования, который может содержать от одного до десятков периодов. От числа периодов в цикле зависит дискретность изменения электрической могцности в нагрузке. При двух периодах дискретность составит 50%, а при двадцати-уже 5%. Это положение необходимо учитывать при оценке точностных характеристик системы регулирования, например температуры объекта. Для малоинерционных объектов с постоянной времени порядка единиц секунд существенным обстоятельством при циклическом методе управления является время 2 ( Рис 2.42, б), в течение которого тиристоры закрыты и через нагрузку не протекает ток. При двадцати периодах в цикле регулирования это  -\-t 
Рис. 2.48. Диаграмма напряжения на нагрузке при фазоциклическом (а) п цикло-фазовом (б) методах управления мощностью время при минимальной мощности составляет около 0,4 с, а при пятидесяти - около 1 с. Фазоциклический метод управления (ФЦУ), сохраняя практически все достоинства циклического метода, обеспечивает возможность уменьшения дискретности преобразования. При этом методе в течение цикла преобразования осуществляется обычное циклическое управление, а в каждом периоде - фазовое управление, как это показано на рис. 2.48, а. При этом средняя за период преобразования (цикл) мощность, выделенная на нагрузке, определяется как Р„ = Рц+Рфу, где -средняя за цикл преобразования мощность при циклическом методе: P = n/N, при этом ?7- число периодов в цикле с открытыми тиристорами, а N-общее число периодов в цикле; Рфу-средняя за цикл преобразования мощность при фазовом управлении за период: Рфу = Рф/Л^; Рф-средняя за период мощность при фазовом управлении. С учетом (2.11) Р =YA( -1 л. Д|-5п2яр' Другим комбинированным методом управления активной мощностью является циклично-фазовый метод, при котором в течение цикла так же, как и в предыдущем случае, осуществляется циклическое управление, а в каждом периоде подключения нагрузки к источнику переменного тока напряжения-фазовое. Диаграмма напряжения на нагрузке приведена на рис. 2.48, б. При этом значение средней за время цикла активной мощности определяется как Р - Р где и - число периодов в цикле с регулируемым фазовым управлением; N-обгцее число периодов в цикле. Тиристорные ключи предназначены для бесконтактного включения нагрузки, работающей на переменном токе. В логическом контроллере Логикой , который используется в системах управления оборудованием, применены модули тиристорных ключей, на одной плате которых размещено четыре канала, коммутирующих цепь переменного тока напряжением 10...220 В и током 0,1...2 А. Все каналы имеют электронную защиту от перегрузок при токе 8... 10 А, схему синхронизации включения при переходе напряжения через нуль, схему предотвращения ложных срабатываний при включении питания, а также схему автоматического включения любого канала после устранения перегрузки. Тиристорные ключи работают совместно с платой синхронизации. На плате формируются и поступают на все каналы тиристорного ключа импульсы: синхронизации СИ-1, сброса защиты В, управляющие сигнализацией /у„р. На рис. 2.49 представлена схема одного канала модуля тиристорных ключей 4КТ220-2. При подаче на Вход 1 напряжения логического О на выходе схемы управления устанавливается логическая 1 , транзистор VTI открывается и по светодиодам тиристоров V9 и V10, включенных в коллекторную цепь транзистора VTI, протекает ток. Тиристоры открываются, и в нагрузке, включен-
Иа ПБ , Сброс защиты .В - - Выход! ~10...ггов - -Ю 0-, 153 Выход 2 - /гг/ /125* + 5В Vnt7 VS Tf-, Ю7 VU21 --рч пл Па схему U [y.ll) чт Olt (p урраВления Схема защиты от перегрузни по таку Рис. 2.49. Принципиальная схема одного канала тиристорного ключа ной в цепь тиристоров V9 и VIO, начинает течь ток. На выходе схемы управления появляется сигнал Сигнализация , который может использоваться для сигнализации срабатывания данного тиристорного ключа. При увеличении тока в нагрузке до 8... 10 А переменное напряжение, снимаемое с датчика тока, которым является включенный в цепь нагрузки резистор R53, преобразуется на диодной матрице VI в постоянное, ограничивается по амплитуде на стабилитроне VDM, сглаживается фильтром R25, С5 и поступает на светодиод оптрона V5. Оптрон V5 открывается, а транзистор VT6 закрывается. Порог срабатывания оптрона V5 устанавливается с помощью резистора jR25. Напряжение логической 1 с коллектора VTd поступает на схему управления, вызывает закрытие транзистора VT\ и разрешает прохождение импульсов управляющей частоты /упр.сигн. - Тиристоры и F10 закрываются, и ток в нагрузке падает до нуля. Тиристор V5 остается открытым, так как на него не подано постоянное напряжение + 5 В. Один раз в течение 4 с импульс защиты закрывает транзистор КГЗ, в коллекторную цепь которого включен тиристор оптрона V5. Тиристор закрывается, а транзистор VTb открывается, вызывая при этом открытие транзистора VT\ и тиристоров V9, F10. Если ток в нагрузке опять превышает 8... 10 А, то вновь срабатывает электронная защита. При коротком замыкании в цепи нагрузки любого канала тиристорных ключей импульс Сброс защиты В поступает на схему включения за 10... 15 электрических градусов до перехода синусоиды напряжения через нуль, при этом ударный ток перегрузки тиристоров не превышает допустимых пределов. Если перегрузка в цепи нагрузки устранена, то работа канала ключа происходит, как было описано выше. Для устранения ложных срабатываний при включении питания на схему управления поступает импульс Сброс защиты В , который блокирует транзистор VT\ в течение переходных процессов. Тиристорные ключи позволяют управлять асинхронным электродвигателем (рис. 2.50). При подаче напряжения логической 1 на Вход 1 и Торможение 1 схемы управления тиристорного ключа (см. рис. 2.49) синхроимпульс СИ-1 сбрасывает триггеры в Рис. 2.50. Схема управления асинхронным электродвигателем О /г/ Cf Выюд t-г Выход г-г Вь ход 1-1 Выход схеме управления в состояние 1 и транзистор VTI закрывается. При подаче на Вход 1 сигнала логического О , а на вход Торможение 1 сигнала логической 1 открываются тиристоры первого канала и электродвигатель вращается в одну сторону. При подаче на Вход 2 сигнала логического О , а на Вход 1 логической 1 открываются тиристоры второго канала и электродвигатель вращается в другую сторону. Транзисторный ключ предназначен для коммутации цепей постоянного тока. В логическом контроллере Логикой применяется модуль транзисторных ключей 8КТ24-2, который коммутирует цепи нагрузки с напряжением 12...24 В и током до 2 А. На одной плате размещается восемь каналов транзисторных ключей. Все каналы имеют электронную защиту от перегрузок при токе 2,5...3 А, схемы предотвращения ложных срабатываний при включении питания и схему автоматического включения любого канала после устранения перегрузки. Модуль транзисторных ключей 8КТ24-2 так же, как и модуль тиристорных ключей 4КТ220-2, работает совместно с платой синхронизации. На рис. 2.51 представлена принципиальная схема одного канала модуля транзисторных ключей 8КТ24-2. Основным коммутирующим элементом является транзистор VT3. При подаче на Вход 1 канала сигнала логического О открывается транзистор VTI, затем открывается транзистор VT2 и через нагрузку, подключенную последовательно с резистором R5, протекает ток. На выходе модуля появляется сигнал Сигнализация , наличие которого говорит о срабатывании данного канала. Сброс В Супр. еигн. 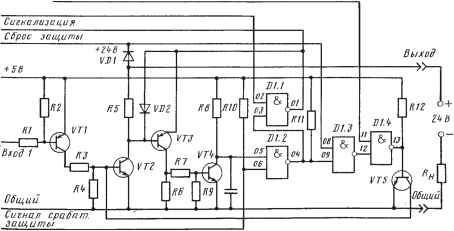 Рис. 2.51. Принципиальная схема одного канала модуля транзисторных ключей При увеличении тока нагрузки до 2,5...3 А открывается транзистор VT3. Напряжение, снимаемое с коллектора транзистора VT3, открывает транзистор VT4, и на вход микросхемы D1.2 поступает сигнал логического О . Микросхема Dl.l получает разрешение на пропускание импульсов управления сигнализацией ( /упр.сигн. ), и сигнал Сигнализация начинает изменяться с частотой, равной частоте поступающих импульсов. С выхода микросхемы DIA сигнал логической 1 поступает на базу транзистора VT5 и он открывается, а напряжение, снимаемое с коллектора транзистора VT5, закрывает транзистор VT2. При этом ток в нагрузке падает до нуля. Один раз в течение 4 с на вход микросхемы Dl.i поступает импульс Сброс заищты В . В этом случае напряжением логического О с выхода микросхемы D1.4 закрываются транзисторы VT5 и VT3. Если перегрузка не устраняется, защита включается вновь после прохождения импульса. Если перегрузка устранена и транзистор VJ3 закрыт, включается канал транзисторного ключа. Для устранения срабатываний в момент включения питания на микросхему D1.4 поступает импульс Сброс защиты В , который открывает транзистор VT5. Транзистор VT5 на время переходных процессов блокирует транзистор VT2. Глава 3. СТРУКТУРА И СОСТАВ МИКРОПРОЦЕССОРНЫХ СИСТЕМ УПРАВЛЕНИЯ 3.1. СТРУКТУРА МИКРОПРОЦЕССОРНЫХ СИСТЕМ УПРАВЛЕНИЯ ОБОРУДОВАНИЕМ Специальное технологическое оборудование (СТО) является сложным объектом управления и содержит большое число взаимодействующих узлов и агрегатов. Основные особенности СТО отражает его структура (совокупность узлов, агрегатов и связей между ними). В свою очередь, структура системы управления (СУ) представляет совокупность агрегатов и узлов объекта управления (ОУ), а также технических средств управления со всеми взаимными связями между ними. Выбор структуры СУ состоит в разбиении на подсистемы и обеспечении взаимодействия этих подсистем. Задача выбора структуры СУ не имеет однозначного решения, что обусловлено многообразными и часто противоречивыми требованиями (стоимость, надежность, безопасность и др.). Сложность создания оптимальной системы управления для специального технологического оборудования микроэлектроники определяется не только исключительно высокими темпами развития СТО, многообразием его видов, но и непрерывным увеличением числа исполнительных органов и датчиков в каждой единице оборудования. С учетом этих особенностей можно выделить следующие основные требования к СУ СТО: 1) обеспечение безопасной работы обслуживающего персонала; 2) обеспечение безопасности оборудования в аварийных ситуациях; 3) управление оборудованием по заданной циклограмме; 4) диагностика состояния СУ; 5) диагностика состояния оборудования; 6) гибкость при изменении технологии; 7) возможность наращивания и модернизации аппаратной части СУ и СТО; 8) возможность работы в составе автоматизированной линии; 9) минимальные сроки разработки; 10) минимальные сроки обслуживания, ремонта. Возможность исполнения этих требований в значительной степени определяется структурой системы и управления. Использование в СУ микроэвм и микропроцессорных программируемых контроллеров позволяет реализовать различные варианты СУ,
|
 Как выбрать диван  История мебели  Стили кухонной мебели  Публикации  Инверторы  Приемники |
|||||||||||||||||||||






