
|
|
|
Главная » Микропроцессорная технология 1 ... 6 7 8 9 10 11 12 ... 16 = 10 с, то относительная погрешность дискретности измерения периода бг = ±(Гe,/ГJ=±5.10- или ±0,00005 %. Принимая во внимание, что при малых погрешностях измерения периода относительная погрешность измерения частоты равна относительной погрешности измерения периода, т. е. бу = бг, (4.6) несложно заключить, что косвенное измерение частоты в данном случае позволило резко повысить точность по сравнению с прямым измерением частоты: относительная погрешность дискретности уменьшилась в 400 ООО раз. Не следует забывать, что при пользовании обычными цифровыми частотомерами для нахождения искомого значения частоты по результату измерения периода требуются вычисления, проводимые вручную (с помощью микрокалькулятора). В дальнейшем нам понадобится соотношение между абсолютными погрешностями дискретности А/ и Ат. Поскольку 6f = Aflfx и 6т = Ат1Тх, то из равенства б/ = бг следует, что Д/ = /Дг = №,. (4.7) 4.4. МИКРОПРОЦЕССОРНЫЕ ЦИФРОВЫЕ ЧАСТОТОМЕРЫ Введение. Применение микропроцессорных систем в цифровых частотомерах дает возможность автоматизировать установку требуемого диапазона частот и вычислительные процедуры (в частности, нахождение числового значения частоты, обратного результату прямого измерения периода), осуществить управление всеми блоками частотомера и организовать их взаимодействие, задавать требуемую длительность временных ворот (например, 1 с) и формировать их непосредственно в микропроцессоре, программировать выполнение набора функций в многофункциональных приборах, обрабатывать результаты наблюдений, осуществлять автоматический контроль работоспособности частотомера, получать отображение результатов измерений в удобной форме, снизить потребляемую мощность. Использование микропроцессорной системы не исключает наличия в составе прибора набора стандартных блоков электронной техники (таких, как формирователи импульсов, логические элементы, делители частоты и т. п.), составляющих аппаратную часть частотомера. Но по сравнению с обычными приборами, выполненными согласно схемам с жесткой логикой, аппаратная часть сокращена и, кроме того, отпадает необходимость в электромеханической коммутации блоков для изменения функции, выполняемой прибором. Рассмотрим примеры микропроцессорных частотомеров. Сервисный цифровой частотомер. Это сравнительно простой вариант частотомера, входящего в состав сервисного мультиметра [38]. Для расширения его функций (измерение частоты) в состав этого прибора введена специально разработанная (заказная) измерительная интегральная микросхема. Описываемый прибор измеряет частоту в сравнительно узком (для цифровых частотомеров) диапазоне 20 Гц ... 200 кГц, который разбит на четыре поддиапазона с верхними граничными частотами: 200 Гц; 2, 20 и 200 кГц соответственно. Структурная схема частотомера приведена на рис. 4.8. Конструктивно формирователи импульсов и временных ворот, мультиплексоры, временной селектор, генератор, вырабатывающий счетные импульсы с частотой следования сч = 400 кГц, и 12-разрядный двоичный счетчик расположены внутри измерительной интегральной микросхемы (конкретные числовые характеристики приводятся для того, чтобы сделать описание работы прибора более наглядным; те же принципы могут быть осуществлены и при иных значениях характеристик). Значения частоты от 20 Гц до 2 кГц измеряются косвенным путем: непосредственно измеряется период и по результату измерений микро-ЭВМ вычисляет значение частоты. Для частот, лежащих в пределах 2... 200 кГц, осуществляется прямое измерение. Целесообразность такого решения подтверждают следующие расчетные данные. При косвенном измерении значения частоты 20 Гц максимальная абсолютная погрешность дискретности, определяющая разрешающую способность, согласно (4.7) составит Д/ = 400/(400-10) =0,001 Гц, а при прямом измерении того же значения частоты с установленной длительностью временных ворот 1 с эта погрешность будет 1 Гц. Для значения частоты 200 Гц абсолютные погрешности соответственно получатся 0,1 и 1 Гц. Легко установить, что в случае измерения частоты 2 кГц косвенное измерение сопровождается абсолютной погрешностью iA/ = = 10 Гц, а прямое - абсолютной погрешностью А/=1 Гц. Рассмотрим работу измерителя, изображенного на рис. 4.8, используя поясняющие графики, приведенные на рис. 4.9. Напряжение исследуемого сигнала (рис. 4.9,а), значение частоты fx которого требуется измерить, поступает через входной блок на формирователь импульсов, где преобразуется в периодическую последовательность положительных импульсов (рис. 4.9,6). Они поступают в формирователь временных ворот, содержащий делитель частоты, у которого устанавливается одно из двух значений коэффициента деления: i = 16 или (/2=128. Измерительная процедура всегда начинается с измерения периода. Это регламентируется подачей сигнала с микро-ЭВМ на управляющие входы 3 (см. рис. 4.8) обоих мультиплексоров, при котором входы 1 я 2 временного селектора соединяются со входами 1 первого и второго мультиплексоров соответственно. Одновре-.менно у делителя частоты формирователя временных ворот устанавливается коэффициент деления qi = \6. В результате на вход 1 временного селектора поступает стробирующий импульс - временные ворота длительностью qiTx=l6Tx (рис. 4.9,в), где Тх - 84
Дисплей Однокристальная микроэвм Мультиплексор 1 Временной
Счетчик Сигнал переполнения счетчика Рис. 4.S 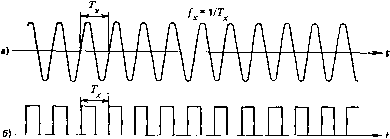
п Рис. 4.9 99999999999999 период исследуемого сигнала, а ко входу 2 временного селектора подводятся счетные импульсы от генератора, заполняющие стробирующий импульс (рис. 4.9,г). Их число A=(7ifсчГж=64-lOV/ж. Например, при измерении значения частоты /ж = 20 Гц получается число Л^ = 320 000. Поскольку оно в несколько раз больше емкости счетчика (С = 22 = 4096), то последний в процессе поступления импульсов многократно переполняется. Сигналы переполнения и остаточное двоичное число, фиксируемое счетчиком, поступают в микро-ЭВМ и оттуда - после вычисления значения частоты - на дисплей. Он отображает результат в виде десятичного числа с указанием единиц измерения частоты. Если значение периода исследуемого сигнала окажется недостаточно большим, то микро-ЭВМ, сохраняя тот же режим измерения, автоматически установит у делителя частоты коэффициент деления (/2=128, после чего длительность стробирующего импульса станет равной 128 Тх- Может оказаться, что и теперь число импульсов, заполняющих временные ворота, относительно мало. Тогда микро-ЭВМ так изменит режим работы, что прибор будет измерять частоту непосредственно. При переводе прибора в режим прямого измерения частоты согласно управляющему сигналу микро-ЭВМ входы / и 2 временного селектора подклк>чаются ко входам 2 первого и второго мультиплексоров соответственно (см. рис. 4.8). После этого на вход / временного селектора подается из микро-ЭВМ стробирующий импульс (временные ворота) длительностью 1 с (рис. 4.9,5), а на вход 2 временного селектора поступает с выхода формирователя импульсов периодическая последовательность импульсов с частотой следования fx (рис. 4.9,6). Счетчик подсчитывает число импульсов, попадающих во временные ворота (рис. 4.9,е). Зафиксированное в счетчике число и сигналы переполнения, если они появляются, подаются в микро-ЭВМ, которая после обработки передает результат измерения на дисплей. В описываемом частотомере использована однокристальная 4-разрядная микро-ЭВМ, для которой характерно малое потребление мощности (ток 50 мкА при напряжении 3 В). Она имеет двунаправленную выходную схему, позволяющую непосредственно управлять 72 сегментами цифровых индикаторов дисплея. Исходная программа работы микро-ЭВМ составлена на языке ассемблера. В частотомере, выполненном по схеме, изображенной на рис. 4.8, может быть осуществлен автоматический контроль (самоконтроль) нормального функционирования прибора. Для этого по команде микро-ЭВМ выход генератора счетных импульсов, следующих с частотой Рсч, подключается ко входу прибора, который работает в режиме измерения частоты. При нормальном функционировании частотомера дисплей будет показывать значение Рсч. Возможен и иной вариант соединений согласно управляющему сигналу микро-ЭВМ: вход 2 первого мультиплексора соединяется со входом 1 временного селектора (на этот вход подается стробиру-86 ющий импульс длительностью Д/к=1 с), а его вход 2 подключается ко входу / второго мультиплексора (к данному входу подводятся счетные импульсы). Дисплей отображает значение Рсч, если схема нормально функционирует. Широкодиапазонный цифровой частотомер повышенной точности. Большой интерес представляют приборы, измеряющие частоты в широком диапазоне (например, 0,01 Гц ... 320 МГц или 10 Гц ... 1 ГГц) с малой погрешностью дискретности, максимальное значение которой остается постоянным во всем диапазоне измерений. Органичной частью таких приборов служат микропроцессорные системы, без которых крайне сложно осуществить вычисления, диктуемые алгоритмом измерения, а также управление блоками прибора и режимами его работы. Сначала рассмотрим идею оригинального варианта метода дискретного счета, позволяющего измерять частоту с малой и постоянной погрешностью в широком диапазоне, а затем выясним, как эта идея осуществляется аппаратурно. Предположим, что исследуемый периодический сигнал, значение частоты fx которого требуется найти, - сигнал синусоидальной формы (рис. 4.10,а). Он преобразуется в периодическую последовательность импульсов (рис. 4.10,6) с периодом Тх следования, равным периоду исследуемого сигнала. Независимо от этой последовательности формируются первые временные ворота длительностью Д/i (рис. 4.10,в). Они заполняются импульсами периодической последовательности, при этом в ворота попадает п импульсов (рис. 4.10,г). Число п фиксируется. Согласно (4.3) отношение п/Д/к соответствует значению fx измеряемой частоты. Его отклонение от значения fx определяется погрешностью дискретности, уменьшение которой и является целью применения данного метода. Одновременно формируются вторые временные ворота - такие, что фронт этих ворот соответствует импульсу последовательности, появившемуся в первых воротах сразу после их отпирания, а срез - импульсу, возникающему сразу после запирания первых ророт (рис. 4.10, д и е). Таким образом, длительность вторых временных ворот точно равна целому числу периодов исследуемого сигнала, т. е. At2 = nTx (рис. 4.10,е). Фронт и срез образованных ворот синхронизированы с моментами появления импульсов периодической последовательности, сформированной из исследуемого сигнала, поэтому погрешность округления исключается. Во вторые ворота направляются счетные импульсы (рис. 4.10,ж). Число N счетных импульсов, заполнивших вторые временные ворота (рис. 4.10,3), фиксируется. Формулу для нахождения значения измеряемой частоты можно получить следующим путем. Число импульсов, попавших во вторые временные ворота, как это видно из рис. 4.10,е и з, определяется отношением N = (nTx/T,) = nF,Jfx,  п
Рис. 4.10 fx{n/N)F,, (4.8) где - частота следования счетных импульсов, значение которой известно. Точность измерения частоты определяется погрешностью дискретности измерения интервала времени пТх. Получим выражение для относительной погрешности дискретности б/ измерения частоты, для чего сначала определим максимальное значение относительной погрешности дискретности измерения интервала времени At2 = nTx. Так как этот интервал запол-88 няется счетными импульсами с периодом следования Гсч, то максимальная абсолютная погрешность Д2 = ±Гсч, а максимальная относительная погрешность = ± Гс,/А 2 = ± TJn Т^. (4.9) Равенство nTx=At2 можно представить в виде fx=n/At2. Тогда в соответствии с правилами вычисления погрешностей косвенных измерений погрешность измерения функции (fx) связана с погрешностью измерения аргумента (Д/2) соотношением (с точностью до второго порядка малости) б/=б2. После подстановки 62 из (4.9) получим 8f=±T,JinTx)=±(fJn)T . (4.10) Согласно (4.3) можно записать равенство At\ = nlfx- Подставив в (4.10) вместо fjn отношение (fx/n) = \/Ati, будем иметь 8f=±T,jAt,= ±l/iF At,). (4.11) Формула (4.11) приводит к заключению, что максимальное значение относительной погрешности дискретности измерения частоты изложенным вариантом метода дискретного счета не зависит от значения измеряемой частоты и, следовательно, постоянно во всем диапазоне измерения. При частоте следования счетных импульсов сч=10 МГц и длительности первых временных ворот Ati = l с (как это имеет место в некоторых частотомерах) максимальное значение относительной погрешности дискретности 6;= ± 10-7. Если при измерении длительности интервала времени At2 = nTx применить метод интерполяции, то для той же частоты следования счетных импульсов Fc4==10 МГц и той же длительности первых временных ворот Ati = l с получим б;=± Ю-о. Теперь рассмотрим структурную схему прибора, осуществляющего измерения согласно рассмотренному варианту метода дискретного счета. Она приведена на рис. 4.11. Фигурирующие в схеме логические элементы Иь Иг. НЕ относятся к блоку формирования и управления, но изображены вне его для большей наглядности пояснения работы схемы. Исследуемый сигнал частотой fx (рис. 4.10,а) передается через входной блок в формирователь импульсов, где преобразуется в периодическую импульсную последовательность (рис. 4.10,6). Она поступает на первый вход временного селектора /, ко второму входу которого подводится вырабатываемый внутри микропроцессора стробирующий импульс, представляющий собой первые временные ворота длительностью At] = l с (рис. 4.10,в). Заполняющие эти временные ворота импульсы (рис. 4.10,г) подсчитыва-ются счетчиком /, в нем фиксируется число п.
Формирователь импульсов Временной селектор 1 Генератор счетных импульсов Блок формирования и управления Счетчик 1 Временной селектор 2
Рис. 4.11 Стробирующий импульс, выполняющий роль первых временных ворот, подается с микропроцессора также на вход 2 логического элемента И] и на вход логического элемента НЕ. Вследствие этого импульсы периодической последовательности, подводимые с выхода формирователя ко входам / логических элементов Иь Иг, могут пройти на вход 1 блока формирования и управления, если на входе 2 элемента Hi имеется стробирующий импульс, а на вход 2 блока формирования и управления если отсутствует стробирующий импульс на входе логического элемента НЕ. Схема формирования вторых временных ворот длительностью пТх (входы 1 и. 2 блока формирования и управления - это ее входы) выполнена на двух триггерах. Особенности ее работы заключаются в следующем. Импульсы, поступающие при исходном состоянии схемы на ее вход 2, не оказывают воздействия на схему. Первый импульс, поступающий через логический элемент Hi на вход 1 схемы, переключает ее первый триггер, это влечет за собой переключение второго триггера, образуется положительный перепад напряжения на его выходе, и в результате на выходе схемы формируется фронт вторых временных ворот (рис. 4.10, д а е). После этого импульсы, подаваемые на вход 1 схемы формирования, состояния ее не меняют. Пока имеется стробирующий импульс на входе логического элемента НЕ, импульсы периодической последовательности не могут проходить через логический элемент Иг. Но сразу по окончании действия стробирующего импульса первый импульс последовательности поступает через логический элемент Иг на вход 2 схемы и возвращает второй триггер в исходное состояние. На его выходе образуется отрицательный перепад напряжения - формируется срез вторых временных во- рот (рис. 4.10,(3 и е). Таким образом, на входе 2 второго временного селектора получаются вторые временные ворота длительностью Ati - nTx, через которые проходят счетные импульсы (рис. 4.10, с). Попавшие в ворота импульсы (рис. 4.10,з) подсчитыва-ются счетчиком 2, в нем фиксируется число N. Микропроцессорная система, в памяти которой как константа хранится значение Рсч, вычисляет значение частоты fx согласно (4.8). Результат вычисления передается на дисплей, который может быть выполнен в виде цифровых индикаторов (например, на жидких кристаллах) или на основе электронно-лучевой трубки. Микропроцессорная система не только осуществляет необходимые вычисления, но и управляет выбором режима в поддиапазона измерений, установкой запятой в показании прибора, а также соответствующих единиц измерения (Гц, кГц, МГц). Наличие микропроцессорной системы позволяет расширить функции, выполняемые прибором: проводить многократные наблюдения и усреднять их результаты, измерять не только частоту, но и период периодического сигнала, интервалы времени, фазовые сдвиги (при наличии дополнительного блока в составе аппаратной части), исключать систематическую погрешность при измерении интервалов времени, обусловленную задержкой опорного и интервального импульсов в каналах передачи сигналов. Кроме того, микропроцессорная система дает возможность осуществлять автоматический контроль нормального функционирования частотомера, включать прибор в измерительную систему посредством интерфейса, выполнять передаваемую через него внешнюю программу измерений. Глава пятая. ЦИФРОВЫЕ ВОЛЬТМЕТРЫ И МУЛЬТИМЕТРЫ 5.1, ОБЩИЕ СВЕДЕНИЯ Известно, что цифровые вольтметры получили широкое распространение в технике измерения напряжений постоянного и переменного тока. Это объясняется многими достоинствами цифровых вольтметров: высокой точностью, широким диапазоном измерений при высокой чувствительности, отсчетом в цифровой форме (практически исключающим глазомерные ошибки и создающим удобство наблюдения на расстоянии), относительной простотой осуществления документальной регистрации показаний, возможностью получения результатов наблюдений в форме, удобной для ввода в ЭВМ, возможностью вывода на интерфейсную шину и включения в состав измерительно-вычислительного комплекса. Следует отметить, что, хотя удельный вес цифровых приборов в общей совокупности выпускаемых вольтметров растет, применение аналоговых вольтметров вовсе не стремится к нулю, как ка- жется некоторым специалистам. Количество производимых типов этих приборов сохраняется примерно постоянным в течение ряда лет (рост удельного веса цифровых вольтметров обусловлен абсолютным увеличением их выпуска). Одна из причин такого положения кроется в том, что на практике не так уж редки ситуации, когда аналоговая форма индикации, в частности стрелочная, предпочтительнее цифровой. К ним можно отнести режим слежения за поведением измеряемой физической величины - контроль постоянства уровня напряжения, решение задачи установки заданного значения напряжения, настройку избирательной системы на определенную частоту и др. Поэтому в современной измерительной технике все чаще появляются цифровые по схемному решению вольтметры с двумя видами устройства отображения в одном приборе: цифровым и аналоговым. Новый этап в развитии цифровых вольтметров связан с построением их на основе микропроцессорной системы. Именно в вольтметрах наиболее полно осуществлены преимущества микропроцессорных измерительных приборов, отмеченные в § 1.10 и 1.11: дальнейшее повышение точности, расширение измерительных возможностей упрощение и облегчение управления, возможность получения различных математических функций измеренных значений, статистическая обработка результатов наблюдений, самокалибровка и самодиагностика, повышение надежности и экономичности, возможность построения программирувхМых многофункциональных приборов. В самом общем виде структурная схема микропроцессорного цифрового вольтметра представлена на рис. 5.1. Входной блок содержит аналоговые преобразователи - это прежде всего аттенюатор и усилитель, но в некоторых приборах в состав блока может входить также измерительный преобразователь напряжения переменного тока в напряжение постоянного тока. Такое схемное решение применяется тогда, когда быстродействие микропроцессора недостаточно для вычисления среднеквадратического значения измеряемого напряжения. Обязательным узлом каждого цифрового вольтметра, в том числе микропроцессорного, является аналого-цифровой преобразователь (АЦП). Современная микроэлектронная техника представляет разработчику измерительных приборов АЦП в интегральном исполнении, выпускаемые в виде БИС. Однако не следует полагать, что наличие АЦП и микропроцессора полностью гаранти-
Микропроцессорная система Дисплей
|
 Как выбрать диван  История мебели  Стили кухонной мебели  Публикации  Инверторы  Приемники |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||






