
|
|
|
Главная » Теория управления 1 ... 12 13 14 15 16 17 18 ... 31 - 2ДхД2 бф2 <Эф2 dxi dzi + \ dzi dxi dZi бфз dzz \ дгз dzt I. Л . I *Рз \2 / Йфз Йфз 623 Xl Последнее выражение приведем к квадратичной форме вида Di = Ci (Дх)2 - 2сзДхД2 4- С2(Д2)2 > о, (5.41) где бфз бфз dzz dxi 1 \ dxi Йф2 \2 / Йфз дх dza +1 бфз бфз бфз дгз бг:з dz. 6z3 6z (5.42) Условие устойчивости (5.41) соблюдается при Oi -Оз -аз а2 > 0; ai > 0. (5.43) Неравенство (5.43) является критерием устойчивости автоколебаний в системе экстремального управления. Как видно из изложенного, проверка ЭС на устойчивость связана с определением частных производных координат реверса по всем переменным. Наиболее тяжелым режимом работы ЭС с точки зрения устойчивости является отработка монотонных возмущений, вызывающих дрейф статической характеристики объекта управления. Такие возмущения могут привести систему в состояние, соответствующее одному из крайних положений исполнительного механизма. Работоспособность таких ЭС обеспечивается введением в систему специального устройства - коммутатора, предназначенного для организации принудительных проверочных реверсов, что обеспечи вает немонотонное движение системы к экстремуму. Если экстремальная система не отвечает требуемым показателям качества: неустойчива или не обеспечивает заданных параметров автоколебаний, имеет недопустимо большие потери на поиск, Малое быстродействие, то необходимо принять меры по улучшению Качества управления ЭС. Остановимся на одном из методов повышения качества ЭС, предназначенных для увеличения быстродействия системы, т. е. для сокращения времени переходного процесса без снижения качества в статических режимах работы. В ЭС время переходного процесса определяется иначе, чем в Непрерывных системах: под временем переходного процесса в ЭС
Рис. 5.11. Устройство формирования входного сигнала экстремального регулятора: а - структурная схема; б, в - статические характеристики понимается время, отсчитываемое от момента начала поиска экстремума до возникновения колебаний вокруг него. Обратимся к экстремальной системе (рис. 5.8). Из уравнения (5.29) и рис. 5.8 видно, что для нахождения экстремума функции f(x) при X = Хопт, Т. е. для выполнения задачи управления, на экстремальный регулятор необходимо подавать функцию Ф = При большой скорости перемещения исполнительного механиз- ма, т.;е. при больших значениях параметр z изменится мало, так как время переходного процесса мало. При этих условиях экстремальный регулятор будет отыскивать экстремум функции y = f{x), если на его вход подается только значение При этом с увеличением скорости исполнительного механизма точность поиска экстремума функции у = f{x) повышается. Для измерения производной выходной величины по времени, т. е. для измерения в ЭС применяются автоматические ком- пенсаторы (рис. 5.П) -устройства формирования входного сигнала (УФС) экстремального регулятора. Физическая схема УФС включает в себя усилитель (У) с коэффициентом усиления k и отрицательной обратной связью, содержащей интегрирующее звено. Обратная связь реализуется реверсивным конденсаторным двигателем (РД), имеющим зону нечувствительности 2д. Структурная схема РД представляется в виде последовательного соединения интегрирующего звена и нелинейности со статической характеристикой Z2 = (p{zi). В пределах линейных участков статической характеристики передаточная функция УФС, как видно из рис. 5.П, имеет вид Р^ - 1 + kJ(Tp) 1 + Tplk В пределах изменения - 2:д<2<;2д, т. е. в пределах зоны нечувствительности двигателя, Zi = kz, так как обратная связь равна нулю. В результате при медленном изменении z на сигнум-реле --т.:----1 Tpti ywc- Рис. 5.12. Экстремальная система с устройством формирования входного сигнала регулятора: а - функциональная схема; б -движение системы к экстремуму поступает сигнал, пропорциональный выходной величине объекта z, и поиск экстремума осуществляется по параметру z. Использование УФС обеспечивает поиск экстремума статичес-vr. .характеристики объекта управления с высокой скоростью без перехода на противоположную ветвь характеристики y=f{x). Это значительно уменьшает время поиска экстремума. Функциональная схема такой системы приведена на рис. 5.12, а. Рассмотрим характер движения к экстремуму в этой системе. Допустим, что исполнительный механизм (ИМ) включился на возрастание входной величины х объекта управления (ОУ) при X = xi, т. е. в точке Mi статической характеристики y = f(x) (рис. 5.12,6). В точке Мг при х = Xo-ai производная выходной ве-dz личины достигает максимального значения. Последующее увеличение X приведет систему в состояние, характеризуемое точкой Мз, в которой производная станет отличаться от своего максимального значения на величину зоны нечувствительности сигнум-реле. Это вызовет реверс ИМ и уменьшение х до некоторой точки Mi, в которой вновь произойдет реверс ИМ. В дальнейшем характер движения повторяется и система будет реверсироваться dz I dz \ в районе X - Хопт. При этом ~J и выходная величи- на Z объекта управления со скоростью, близкой к максимальной, стремится к экстремуму. Сокращение времени поиска экстремума без УФС, а только за счет увеличения скорости исполнительного механизма неэффективно, так как увеличивает амплитуду автоколебаний и потери на поиск. С другой стороны, поиск экстремума по величине может оказаться затруднительным в случаях плохо выраженных экстремумов статических характеристик объектов ЭС; в этих случаях сложно реализовать устройство, измеряющее величину 5.7. САМОНАСТРАИВАЮЩИЕСЯ И САМООБУЧАЮЩИЕСЯ ДИНАМИЧЕСКИЕ СИСТЕМЫ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ Кибернетика - наука об общих законах получения, хранения, передачи и преобразования информации в сложных управляющих системах различной физической природы определена Н. Винером как наука об управлении и связи в животном и машине. Развитие кибернетики, появление и развитие новых технических средств радиоэлектроники, вычислительной техники привело к созданию и внедрению самонастраивающихся и самообучающихся систем автоматического управления - наиболее прогрессивных систем автоматики. Самонастраивающиеся системы. (СНС) - это системы, в которых в процессе функционирования автоматически изменяются некоторые параметры управляющей части или управляющей части и объекта управления с целью обеспечения заданного качества управления в условиях нестационарности объекта управления, задающих и возмущающих воздействий. Самообучающиеся (самоприспосабливающиеся) системы (СОС) -это системы, алгоритм функционирования которых выра-батывается и совершенствуется в процессе самообучения под влиянием внешних возмущений. В зависимости от условий функционирования предусматривается изменение каких-либо параметров элементов СНС, ее структуры, введение логических элементов, вычислительных устройств-элементов автоматического поиска. В СНС управляющие воздействия формируются не только в функции ее координат, но и в зависимости от состояния внешней среды, проявляющегося в изменениях возмущающих воздействий на систему. Элементы самонастройки призваны существенно повысить качество управления в условиях трудно прогнозируемых или вообще непрогнозируемых возмущений. Вместе с тем введение самонастройки существенно удорожает систему, усложняет ее структуру, снижает показатели надежности. Функциональная схема СНС представлена на рис. 5.13, а. Она .состоит из основного контура, образованного объектом управления ,(ОУ) и регулятором (Р), и контура самонастройки, включающего KomffpcoAfo- I настрош(а\ Ж-----=к-~---U-J Основной контур Xstix УСН 1Рис. 5.13. Функциональные схемы самонастраивающейся системы управления; с - с контуром самонастройки; б - с настройкой по внешним воздействиям в себя идентификатор процесса (ИП), устройство оценки входных сигналов (УОВС), вычислительное устройство (ВУ) и исполнительное устройство (ИУ). Идентификатор процесса и УОВС составляют контролирующую часть, в задачу которой входит выработка текущей информации о состоянии объекта и внешней среды. ИП предназначен для определения динамических свойств объекта управления. При этом наиболее полная оценка ОУ заключается в определении его переходных и частотных характеристик, уравнений, передаточной функции и т. п. В более простых случаях в задачу ИП входит формирование отдельных показателей динамики ОУ в дискретной форме. УОВС предназначено для анализа характера внешних возмущений. ВУ вырабатывает или хранит в памяти условие самонастройки, которое в наиболее совершенных СНС является критерием оптимального управления объектом. В наиболее сложных системах уп-г;....,дения в качестве вычислительного устройства используются электронно-вычислительные машины, как цифровые, так и аналоговые. ВУ на основе информации о состоянии объекта и внешней среды, т. е. на основе информации, поступающей от ИП и УОВС, вырабатывает требования к характеристикам регулятора. Информация с выхода вычислительного устройства с помощью исполнительного устройства ИУ преобразуется в воздействие на регулятор, обеспечивая требуемый в данный момент закон управления объектом. Для реализации самонастройки регулятор СНС, а иногда и объект имеют изменяемую часть, характеризующуюся изменяемыми структурой и параметрами. Наиболее характерной чертой СНС является режим автоматического поиска, организуемый с целью выявления отклонений системы от оптимального состояния. В частности, такой поиск осуществляется организацией автоматических пробных движений СНС с анализом входных и выходных переменных. В тех случаях, когда закон изменения характеристик объекта для различных моментов времени может быть заранее определен, можно применять программную настройку, упрощающую структуру СНС. Однако в общем случае закон изменения характеристик неизвестен и требуется вводить элементы самонастройки. По исходному принципу самонастройки СНС подразделяются на системы с самонастройкой по сигналам внешних воздействий; с самонастройкой по динамическим характеристикам объектов; комбинированные, использующие для самонастройки сигналы внешних воздействий и информацию о динамических характеристиках объектов. По способу воздействия элементов самонастройки на систему СНС подразделяются на системы с автоматической настройкой параметров и системы с автоматической настройкой структуры. Последний тип систем получил название самоорганизующихся. По контуру самонастройки и по контуру основной обратной связи СНС могут быть разомкнутыми и замкнутыми. Заканчивая общую характеристику самонастраивающихся автоматических систем, отметим их наиболее характерные черты: наличие двух контуров - основного и контура самонастройки; включение элементов, способных в процессе работы изменять алгоритм функционирования, параметры, характеристики или структуру, причем эти изменения могут быть как непрерывными, так и дискретными; использование вычислительных устройств для выработки и хранения условий самонастройки (критерия оптимизации); высокая чувствительность к изменению параметров возмущающих и управляющих воздействий; автоматический поиск оптимального состояния при случайных воздействиях на систему. На рис. 5.13, б показана функциональная схема СНС с настройкой по сигналам внещних воздействий. Система содержит устрой-.ство самонастройки (УСН), обеспечивающее приведение системы в режим, оптимальный по выбранному критерию, который в общем случае может быть переменным. УСН анализирует входной сигнал Лв, возмущения и помехи f и вырабатывает воздействие, под влиянием которого изменяются параметры или структура регулятора и объекта. По контуру самонастройки система является разомкнутой, если осуществляются измерение и анализ внешних воздействий. Если такого измерения осуществить нельзя, то влияние возмущений анализируется по выходному сигналу Хвых. В этом случае система будет замкнутой как по основному контуру, так и по контуру самонастройки (см. штриховую связь УСН с выходной величиной Хвых). в тех случаях, когда возмущения изменяют параметры объекта и его динамические характеристики, самонастройка осуществляется по динамическим характеристикам объектов управления. Для этой цели широко используются динамические модели, и самонастройка осуществляется по характеристикам модели. СНС с моделями управляемых объектов может строиться с вычислителем параметров объектов, с эталонной или подстраиваемой моделью, с анализатором характеристик объекта и по другим, в том числе комбинированным принципам. В СНС с моделью и вычислителем параметров объекта управления текущие значения параметров объекта сравниваются с параметрами моделей. Такие системы имеют относительно сложный контур самонастройки и низкую ее скорость, обусловленную длительностью вычислений параметров объекта. В связи с этим СНС подобного типа эффективны лишь в случаях, когда параметры .объекта изменяются медленно по сравнению с длительностью переходных процессов в системе. В самонастраивающихся системах с эталонной моделью (рис. .5.14) характеристики объекта управления (ОУ) сравниваются с характеристиками эталонной модели (ЭМ). Вектор состояния системы АХ определяется с помощью индентификатора процесса управления (ИП), выходной вектор которого в устройстве сравнения Е сравнивается с вектором состояния Хм эталонной модели. Сиг- f->r- О!/ УСН Рис. 5.14. Самонастраивающаяся система с эталонной моделью нал рассогласования поступа- ет на устройство самонастройки (УСН), которое формирует воздей-ствия, изменяющие параметры или структуру объекта управления ((ОУ), регулятора (Р), главной обратной связи (ОС). В зависимости от сложности системы УСН может осуществлять настройку по всем трем указанным каналам или по одному из них. Во всех случаях задача контура самонастройки сводится к приведению системы к оптимальному состоянию по требуемому критерию функционирования. В комбинированных самонастраивающихся системах используются оба рассмотренных выше принципа: самонастройка по сигналам внешних воздействий и самонастройка по динамическим ха-p,! .нстикам объекта. Комбинированная СНС также может быть построена на основе эталонной модели, но в этом случае динамические характеристики ЭМ не остаются стабильными, а автоматически изменяются в соответствии с изменениями возмущений \ и входных воздействий Хвх- Для реализации комбинированного принципа самонастройки эталонная модель снабжается дополнительным контуром самонастройки по переменным Х-х и Вместо эталонных моделей в СНС для самонастройки могут использоваться анализаторы характеристик объекта и вычислительные устройства. В этом случае определяемые динамические характеристики системы сравниваются с заданными характеристиками. В качестве динамических характеристик, используемых для оценки качества управления в замкнутых системах автоматического правления, могут быть переходные характеристики, импульсные переходные характеристики, частотные функции. С этой целью в СНС предусматриваются средства создания режимов, необходимых для получения указанных характеристик. Решение задачи синтеза контура самонастройки включает следующие основные этапы: анализ причин, обосновывающих необходимость самонастройки; выбор критерия самонастройки и принципа построения контура самонастройки; разработку алгоритмов идентификации объекта; определение закона изменения настраиваемых параметров; разработку эталонной модели или анализатора характеристик. Задача синтеза контура самонастройки СНС характеризуется большой сложностью, обусловленной нелинейностью объекта с переменными случайными параметрами, связанными сложными зависимостями с возмущающими воздействиями. Вся задача решается в два укрупненных этапа - первичная оптимизация, когда разрабатывается основной контур, и вторичная оптимизация, связанная с разработкой контура самонастройки. Первичная оптимизация решается с использованием ранее рассмотренных методов синтеза оптимальных динамических систем. в самообучающихся системах (СОС) параметры, структура, закон управления изменяются по сложным алгоритмам, которые со-верщенствуются на базе результатов самонастройки. Разработка и эксплуатация самообучающихся систем тесно связаны с проблемой распознавания образов. Системы, построенные на базе распознавания образов, получили название персептрон (от англ. to percept - воспринимать). Персептрон является обучаемой распознающей системой, реализующей корректируемое линейное решающее правило в пространстве фиксированных, случайно выбранных признаков входных сигналов. Под решающим правилом понимается алгоритм, позволяющий по результатам измерений определенных признаков объекта (ситуации) принять решение о значениях его параметров, непосредственно не наблюдаемых при измерениях. Решением может быть, например, отнесение интересующего объекта к тому или иному классу объектов по установленной классификации. Принцип распознавания образов заключается в том, чтобы построить поверхности, разделяющие гиперпространство на конечное число областей, каждая из которых имеет свой образ. Способность системы к распознаванию означает, что известные типы объектов будут приписываться к определенному классу, а если появляется неизвестный тип, не относящийся ни к одному известному классу, то ему приписывается новое подразделение гиперповерхности. Распознавание образов после обучения состоит в проверке новых типов, о принадлежности которых к определенному классу ничего не известно. Самообучающиеся системы функционируют, как правило, на базе ЭВМ. Обеспечение оптимального управления при неполной информации об объекте управления связано с понятием дуального управления, т. е. такого, в котором управляющие воздействия имеют двф^ ственный характер - используются для изучения объекта упв-ления и для приведения его в требуемое состояние. При эттл процессы изучения объекта управления и процессы управления им тесно связаны и образуют единый сложный двойственный, или дуальный, процесс, определяющий качество функционирования системы управления. В общем случае для отыскания оптимальной стратегии дуального управления используются методы динамического программирования. Методы решения задач дуального управления связаны со значительными трудностями, поэтому на практике часто ограничиваются отысканием субоптимальных стратегий путем упрощения постановки задачи или сужения класса допустимых стратегий. В частности, для некоторых типов объектов оптимальной может оказаться стратегия, направленная в каждый момент времени только на приведение объекта к требуемому состоянию и не содержащая в себе специальных функций по изучению объекта. Глава 6 ЭЛЕКТРОННО-ВЫЧИСЛИТЕЛЬНЫЕ МАШИНЫ В ТЕОРИИ И ПРАКТИКЕ УПРАВЛЕНИЯ ДИНАМИЧЕСКИМИ СИСТЕМАМИ 6.1. ТИПЫ ЭЛЕКТРОННО-ВЫЧИСЛИТЕЛЬНЫХ МАШИН Многие задачи, решаемые с помощью современных автоматических систем, требуют формирования таких сложных законов управления объектами, которые не могут быть реализованы традиционными элементами и устройствами автоматики. Так, например, в системах управления движущимися объектами требуются сложные вычисления, связанные с операциями преобразования координат, решением прямоугольных и сферических треугольников, счислением пути и т. п. Очень сложные вычисления производятся в адаптивных системах управления. Анализ и синтез сложных дина-. мич! лх систем также связан с необходимостью решения сложных математических задач. Эти задачи решаются с помощью современных средств вычислительной техники, вводимых в контур управления динамической системой или используемых для разнообразных расчетов и поисков оптимальных решений при анализе и синтезе систем управления. В современной теории и практике управления динамическими системами используются электронно-вычислительные машины (ЭВМ) различных типов, отличающиеся принципом действия, составом элементной .базы, возможностями использования в технических системах управления. По принципу действия все электронно-вычислительные машины, используемые в динамических системах управления, разделяются на два типа: 1) аналоговые (АВМ); 2) цифровые (ЭЦВМ или, чаще, ЭВМ). Разные принципы действия, разная материальная база указанных типов ЭВМ обусловили разные сферы их применения в теории и практике управления динамическими системами. Аналоговые электронно-вычислительные машины представляют собой вычислительные устройства непрерывного (аналогового) типа. Результат вычисления получается в виде непрерывного элект-рического сигнала, отражающего значение определяемой переменной, выводимого на экран осциллографа. Выходной сигнал АВМ может быть также использован как управляющее воздействие в автоматической системе, а сама АВМ может сопрягаться с регулятором в качестве его составной части. Принцип действия АВМ и ее конструкция просты, удобны, быстро осваиваются техническим персоналом. Машина легко сопрягается с элементами систем непрерывного управления. В качестве вычислительной системы АВМ наиболее удобна и эффективна для решения дифференциальных уравнений как линейных, так и нелинейных, особенно с типовыми нелинейностями. Для этого АВМ снабжена набором функциональных блоков, модулирующих нели- упт Г ГРТ -1- Рис. 6.1. Схема операционного усилителя нейности. Порядок дифференциальных уравнений, решаемых на АВМ, различен для различных типов АВМ, однако этот вопрос не имеет принципиального значения, так как аналоговая вычислительная система легко наращивается из отдельных блоков и машин в целом. Основу всякой АВМ составляет операционный усилитель (ОУ) - усилитель постоянного тока (УПТ) с глубокой отрицательной обратной связью и многополюсником (рис. 6.1). В состав многополюсника входят резисторы, конденсаторы, делители напряжения, диодные ограничители и другие нелинейные узлы, содержащие элементы с естественными нелинейными характеристиками, например варисторы - полупроводниковые резисторы с нелинейно изменяющимся электрическим сопротивлением. Различные схемы многополюсников совместно с УПТ обеспечивают ту или иную функциональную зависимость между входными и выходными электрическими напряжениями, т. е. обеспечивают выполнение той или иной математической операции над реальными переменными, которые замещаются электрическими напряжениями. В простейшем случае операционный усилитель совершает инвертирование входного сигнала (рис. 6.2, а). Чтобы убедиться в этом, примем во внимание, что УПТ имеет высокий коэффициент усиления и очень малый входной ток. Поэтому точка суммирования токов i\ и г'о является практически потенциально заземленной и ее потенциал близок к нулю, т. е. ы^О, /вх 0. С учетом этого для схемы (рис. 6.2, а) можно записать , ii = ui/zu io = Ывых/zo; h + io = 0, Ивых Zo Hi Zi Переходя к операторной форме, получим Ывых(р) о(Р) = ~Wip). (6.1) н,(р) z,(p) Из выражения (6.1) видно, что передаточная функция линейного операционного усилителя целиком определяется параметрами входной цепи и цепи обратной связи. Таким образом, изменяя ха-
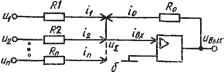 Рис. 6.2. Схемы реализации математических операций: а. - инвертирования; б - суммироваиня
|
 Как выбрать диван  История мебели  Стили кухонной мебели  Публикации  Инверторы  Приемники |
||||||||||||||






