
|
|
|
Главная » Теория управления 1 2 3 4 ... 31 теория управления Возрастающие объемы общественного производства непрерывно усложняют задачи управления разнообразными объектами и процессами. Проблемы управления особенно усложняются в системе человек - машина , где наряду с задачами управления техническими объектами и технологическими процессами остро ставятся задачи эффективного управления системами организационно-технического, экономического и социального характера. Поэтому в вузах для соответствующих специальностей необходима учебная дисциплина, формирующая общую базу для решения задач управления в технических и технико-экономических системах. В учебных планах подготовки инженеров по специальности 22.03 Системы автоматизированного проектирования (САПР) в качестве указанной учебной дисциплины предусмотрен курс Теория управления . Он относится к числу важнейших специальных учебных дисциплин, в значительной мере определяющих профессиональный уровень инженера-системотехника - специалиста по САПР. В предлагаемом учебном пособии рассматриваются основные определения и понятия, необходимые для усвоения принципов разработки и функционирования систем управления, методы математического описания элементов и систем, исследования режимов работы систем управления, выбора управляющих решений в технических и технико-экономических системах, в том числе в условиях неопределенности. Особое внимание уделяется задачам оптимального выбора управляющих решений при наличии множества вариантов решений. Мировоззренческая направленность курса обеспечивается использованием основ диалектической теории познания, ориентацией на принципы единства материального мира. путем широкого использования аналогичного математического описания объектов и процессов технического, экономического и биологического характера. Основой для написания книги послужил многолетний опыт научной, преподавательской и производственной работы автора в области систем автоматического и автоматизированного управления, в частности, накопленный при чтении курсов Теория автоматического управления , Основы построения АСУ , Основы научных исследований , Вычислительная техника и программирование , Введение в специальности АСУ и САПР . При работе над учебным пособием использована обширная отечественная и зарубежная литература по теории автоматического управления, исследованию операций, технической кибернетике, основам автоматизированных систем управления и систем автоматизированного проектирования. Список литературы приведен в конце книги. Все замечания по совершенствованию учебного пособия просьба направлять по адресу: 252054, Киев-54, ул. Гоголевская, 7, издательство Выща школа . КРАТКИЙ ОБЗОР РАЗВИТИЯ И СОВРЕМЕННОГО СОСТОЯНИЯ ТЕОРИИ УПРАВЛЕНИЯ Определим понятие управление как процесс приведения заданных объектов в состояние, отвечающее поставленным целям. Пщ этом объект, которым нужно управлять, назовем объектом управления. Повседневная деятельность человека - производственная, об-шейная, бытовая, административная - связана с управлением объектами разнообразного характера. Управлять можно транспортным средством, металлорежущим станком, строительным трестом, школой, предметом домашнего обихода и т. п. Из выбранных примеров объектов управления видно, что понятие управление чрезвычайно широкое и многообразное. Действительно, задача управления, например, домашним пылесосом существенно отличается от задачи управления кораблем в море, а управление домашним хозяйством нельзя сравнивать с управлением, например, строительным трестом. Несмотря на это, любое управление имеет общие черты, к числу которых относятся: наличие информации о задачах управления - цель управления; наличие информации о результатах управления, т. е. о реакции объекта управления на управляющие воздействия; анализ информации о состоянии объекта и степени его приближения к требуемому состоянию и выработка необходимых управляющих решений; реализация управляющих воздействий. Наука об общих закономерностях процессов управления составляет суть теории управления. Теория управления тесно связана с понятием кибернетика - наукой об управлении, связи и переработке информации. Именно теоретическая (общая) кибернетика рассматривает вопросы управления абстрактно, безотносительно к реальной физической природе объектов управления, находит общие методы подхода к изучению систем, существенно отличающихся по своей природе: технических, биологических, социальных. Задачи управления и соответствующие им способы и средства решения появились вместе с возникновением цивилизации. Есть основание считать, что термин кибернетика как управление в общем смысле применял древнегреческий философ Платон (428- 348 гг. до н. э.). Действительно, греческое слово kyberneUke переводится как искусство управления . Длительное время теория и практика управления развивались под влиянием необходимости решения задач управления техниче- скими объектами. Эти задачи стали достаточно актуальными после появления первых промышленных регуляторов И. Ползунова (1765 г.) и Дж. Уатта (1782 г.). Дальнейшее развитие техники привело к возникновению одного из направлений теории управления- теории автоматического управления (регулирования). Во второй половине XIX в. появился ряд крупных научных работ по теории автоматического регулирования, не потерявших своего значения до настоящего времени. К числу таких работ следует отнести статью русского математика, акад. П Л. Чебышева О центробежном уравнителе (1871 г.). Основы современной линейной теории автоматического регулирования были заложены в трудах крупного русского ученого И. А. Выш.неградского О регуляторах прямого действия (1873 г.), Об общей теории регулирования (1876 г.) и др. Важной заслугой И. А. Вышнеградского является правильная постановка проблемы управления машинной системой, при которой объекты управления - машина и регулятор рассматриваются как единая динамическая система. Он разработал эффективные методы анализа устойчивости системы регулирования, позволяющие проследить влияние на устойчивость различных конструктивных параметров системы регулирования. В конце XIX и начале XX века получают значительное развитие многие отрасли промышленности, транспорт, системы связи. Появляются все более сложные системы автоматики, что потребовало дальнейшего развития теории автоматического управления. Этот период отмечен выдающимися работами русского ученого А. М. Ляпунова (1857-1918 гг.) в области устойчивости динамических систем. Большое влияние на развитие теории управления оказали также работы И. Е. Жуковского (1847-1921 гг.), среди которых следует отметить его труд Теория регулирования хода машин , опубликованный в 1909 г. В первые годы Советской власти одним из первых научных трудов по теории автоматического управления стала работа И. Н. Вознесенского (1887-1946 гг.) О регуляторах непрямого действия . Впоследствии член-корреспондент АН СССР И. Н. Вознесенский стал основателем одной из школ по теории автоматического управления. В годы первых пятилеток наша страна переживала бурное промышленное развитие. В этот период создавались новые и переводились на современную базу старые отрасли промышленности, что требовало интенсивного развития теории управления. Из теоретических работ этого периода заметную роль сыграла опубликованная в 1938 г. работа А. В. Михайлова Метод гармонического анализа в теории регулирования , положившая начало широкому применению частотных методов исследования систем автоматического управления. В период Великой Отечественной войны все усилия советских ученых и инженеров были направлены на создание систем вооружения и систем, обеспечивающих выпуск вооружения. Высокий уровень автоматики и автоматизации производственных процессов в значительной мере способствовал разгрому врага. Большую роль теория и практика автоматического управления сыграла в деле восстановления народного хозяйства в послевоенный период. Было разработано и внедрено в практику управления множество новых элементов, таких как электромашинные и магнитные усилители, разнообразные электронные, механические, гидравлические, пневматические и другие устройства. Начиная с 50-х годов в практику управления все шире стали внедряться электронно-вычислительные машины (ЭВМ), сначала аналоговые, а затем - цифровые, что подняло управление на новую, качественную ступень. На развитие теории управления в послевоенный период существенное влияние оказали работы Н. Винера и К- Шеннона, сыгравшие важную роль в формировании кибернетики как науки, касающейся всей системы человеческих знаний. В конце 50-х и начале 60-х годов начинается новый этап развития производительных сил, получивший название научно-технической революции (НТР). Ее можно определить как коренное, ; .оственное преобразование производительных сил на основе превращения науки в ведуощй фактор развития общественного производства. Важнейшими предпосылками возникновения НТР явились: решение проблемы расщепления атомного ядра и создание источников атомной энергии - практически неисчерпаемых источников энергии; создание ЭВМ; крупные успехи радиоэлектроники, кибернетики, космической техники. НТР изменила весь облик общественного производства, условия, характер и содержание труда, структуру производительных сил, отраслевую и профессиональную структуру общества. Она оказала и продолжает оказывать огромное воздействие на все стороны деятельности человека - производство, быт, культуру, психологию, взаимодействие с природой. Огромные, принципиальные изменения внесла НТР в.-теорию и практику управления общественным производством, что потребовало принципиально новых методов и средств управления. Среди основных факторов, обусловивших коренные изменения в проблемах управления, отметим стремительный рост номенклатуры промышленных изделий, сопровождающийся значительным усложнением изделий и технологии их производства, а также частую сменяемость изделий. Характерно, что моральное старение изделий теперь наступает значительно раньше их физического износа, что требует существенной перестройки технологии, уменьшения сроков разработки и внедрения промышленных изделий. Наряду с отмеченными факторами, на все стороны общественного производства значительно влияет сокращение сырьевых ресурсов, обострились проблемы охраны окружающей среды. Все это существенно усложнило проблемы управления народным хозяйством. Крупные масштабы производства потребовали переработки огромных объемов информации, вовлекая в сферу управления большие массы людей. Информационный взрыв заставил коренным образом изменить методы и средства управления как в экономических, так и в технических системах. Возникло и стало бурно развиваться новое направление теории управления--управление большими (сложными) системами. Теоретической основой этого управления стали экономико-математические методы, а технической- электронно-вычислительные машины. Появились человеко-машинные системы - автоматизированные системы управления (АСУ), автоматизированные системы управления технологическими процессами (АСУТП), системы.автоматизированного проектирования (САПР). Основными теоретическими методами решения задач управления в сложных системах стали методы математического программирования, реализуемые с помощью ЭВМ. Таким образом, ЭВМ стала не только одним из основных элементов систем управления, но и средством решения задач управления. Развитие сложных (больших) систем обусловило стремительное развитие и широкое внедрение в практику одного из важнейших направлений современной теории управления - экономико-математических методов, использующих математические средства для описания экономических объектов и процессов. Начало этому направлению было положено работами советского математика и экономиста, академика АН СССР Л. В. Канторовича. В 1939-40 гг. Л. В. Канторович положил начало линейному программированию - теории и методам решения экстремальных задач с ограничениями. Его научный труд Математические методы организации и планирования производства сыграл важную роль в создании теории оптимального управления народным хозяйством. Оптимальное управление обеспечивает наилучшее (оптимальное) с некоторой точки зрения функционирование управляемого объекта, существенно повышая технико-экономические показатели систем управления. Огромное влияние на развитие теории оптимального управления оказали работы академика АН СССР Л. С. Понтрягина и его сотрудников В. Г. Болтянского, Р. В. Гамкрелидзе, Е. Ф. Мищенко. Сформулированный ими принцип максимума Понтрягина известен во всем мире и широко используется в теории оптимальных процессов. Основные результаты теории оптимального управления содержатся в монографии указанных авторов Математическая теория оптимальных процессов (1961 г.), получившей мировую известность. Развитию теории оптимального управления в значительной степени способствовали идеи метода динамического программирования, основы которого разработаны американским ученым Р. Белл-маном и его сотрудниками. Роль теории и практики управления особенно возрастает в настоящий период, характеризующийся требованиями всемерного ускорения научно-технического прогресса. Стратегический курс КПСС на ускорение социально-экономического развития страны требует коренного технического перевооружения производства на базе современных средств автоматизации, прежде всего электроники и вычислительной техники. Определяя понятие ускорение , Генеральный секретарь ЦК КПСС товарищ М. С. Горбачев подчеркнул: Суть его - в новом качестве роста: всемерной интенсификации производства на основе научно-технического прогресса, структур- ной перестройки экономики, эффективных форм управления... (Политический доклад Центрального Комитета КПСС ХХУП съезду Коммунистической партии Советского Союза). Б Основных направлениях экономического и социального развития СССР на 1986-1990 годы и иа период до 2000 года подчеркивается: Шире исследовать проблемы механики, вопросы теории автоматизации производства... Широко внедрять гибкие переналаживаемые производства и системы автоматизированного проектирования, автоматические линии, машины и оборудование со встроенными средствами микропроцессорной техники, многооперационные станки с числовым программным управлением, робототехнические, роторно-конвейерные комплексы . Теория управления может и должна внести заметный вклад в реализацию стратегического курса КПСС на ускорение социально-экономического развития нашей страны. ОСНОВНЫЕ ОПРЕДЕЛЕНИЯ И ПОНЯТИЯ ТЕОРИИ УПРАВЛЕНИЯ 1.1. ОБЪЕКТЫ И ПРОЦЕССЫ УПРАВЛЕНИЯ. ВИДЫ УПРАВЛЕНИЯ Характеризующую состояние объекта управления ОУ (рис. 1.1) величину .Х^вых, которой нужно управлять, назовем выходной, или управляемой (регулируемой), величиной. В общем случае выходная величина представляет собой вектор .Х^вых={л:вых1, Хвыхг,-. лгвыхп}. Всякий реальный объект находится под влиянием окружающей среды, которое проявляется в возмущающих воздействиях F={fi, fz, .... fk}, приложенных к ОУ. Эти воздействия стремятся вывести ОУ из заданного состояния, для приведения в которое к объекту необходимо прилагать управляющие воздействия, которые назовем входными воздействиями Xbx={bxi, Хвхг, л^вхт}. Место приложения входного воздействия назовем входом. Таким образом, задача управления объектом сводится к тому, чтобы выбрать необходимые входные воздействия Хвх, которые при любых возмущающих воздействиях F обеспечивали бы заданное значение выходной величины Хвых. В некоторых случаях задача управления объектом сводится к задаче регулирования - обеспечению постоянства выходной величины. Для простоты будем рассматривать объекты управления, характеризующиеся одной выходной величиной Хвых, одной входной Хвх и локализованным возмущающим воздействием /. Чаще всего управляющее воздействие не может быть приложено непосредственно к объекту управления, а формируется с помощью технических устройств, называемых регуляторами. Регулятор Р и объект управления ОУ составляют систему управления (регулирования) (рис. 1.2, а). Возможно управление по разомкнутому и по замкнутому циклу. В первом случае между выходной и входной величинами отсутствует непосредственная связь. Она осуществляется через регулятор и объект управления. Управление по разомкнутому циклу обычно выполняется с помощью оператора Оп (рис. 1.2, а), который, наблюдая за значением выходной величины Хвых, устанавливает необходимые значения входной величины Хвх- Управление по разомкнутому циклу называют иначе управлением с разомкнутой обратной связью. Такое управление с непременным участием человека (оператора) называется ручным управлением. При управлении по замкнутому циклу изменения выходной величины передаются на вход системы с помощью совокупности устройств, называемых обратной связью (ОС) (рис. 1.2, б). Вход- 1П 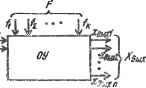 Рис. 1.1. Объект управления ной величиной обратной связи является выходная величина объекта управления Хвых. Выходную величину обратной связи обозначим Хо.с- Эта величина, накладываясь на входную величи- ну! формирует регулирующее воздействие Хр на входе регулятора, который, в свою очередь, формирует управляющее воздействие Хо.у, прикладываемое к объекту управления. Образованная таким образом обратная связь называется главной обратной связью. Для осуществления управления по схеме рис. 1.2,6 необходимо обеспечить условие Хтр = Xjix - Хо.с, {1-1) т. е. выходная величина обратной связи должна вычитаться из величины на входе системы. Такая обратная связь называется отри-.ательной. Вычитание управляющих воздействий производителя в суммирующем устройстве 2 (рис. 1.2,6). Рассмотрим подробнее управление по замкнутому циклу. Пусть задача урравления сводится к поддержанию величины Хвых на заданном уровне. Подбором соответствующего значения величины XъУi устанавливается требуемое значение величины Хвых- Далее процесс регулирования х^ых осуществляется без участия оператора (человека),т. е. автоматически. Действительно, если Хвых> например, превысит заданные значения, го на вход ОС поступит управляющий сигнал, больший того, какой имел место при заданном значении выходной величины Хвых- Это приведет к уменьшению величин-Хр и Хо.с [см. уравнение (1.1)], что повлечет за собой уменьшение величины Хвых- Рассуждая аналогично, можно убедиться в том, что при уменьшении Хвых под влиянием возмущения f процесс управления также будет направлен на стабилизацию Лвых- Управление по замкнутому циклу называют такяе управлением с замкнутой отрицательной обратной связью. Если выходная величина обратной связи суммируется с величиной Хъл, то такая обратная связь называется положительной. При этом Хр = Хвх + Хо.с- (1-2) Если рассмотреть процесс управления по схеме рис. 1.2, б, основы-
f I I -> p Рис. 1.2. Управление: a - по разомкнутому циклу; б - по замкнутому ваясь на выражении (1.2), то легко убедиться, что в этом случае управление невозможно: любое отклонение величины х^ых от заданного будет усиливаться системой. Таким образом, главная обратная связь должна быть только отрицательной. - Процесс управления, осуществляемый без участия человека (рис. 1.2, б), называется автоматическим. Такая схема управления является типичной для автоматического управления любыми объектами, характер работы которых позволяет перевести их в автоматический режим. Совокупность всех устройств, обеспечивающих автоматическое управление объектом, называется системой автоматического управления (САУ). В тех случаях, когда система обеспечивает стабилизацию управляемой величины в заданных пределах, она называется системой автоматического регулирования (САР). Очевидно, что автоматическое регулирование является частным видом автоматического управления. Последнее, однако, обеспечивает управление объектом по более сложным законам, чем стабилизация управляемой величины. Из рис. 1.2, б видно, что САУ может быть определена как совокупность объекта управления и регулятора (обратная связь при этом рассматривается как часть регулятора). Сложность структуры регулятора в конкретной системе автоматического управления зависит от назначения объекта управления и требуемых режимов его работы. Однако в любом регуляторе должны содержаться источники информации о задачах и результатах управления, устройства, анализирующие информацию и вырабатывающие управляющие воздействия, исполнительные устройства, реализующие их. Схема системы управления, представленная как совокупность элементов, выполняющих определенное функциональное назначение, называется функциональной схемой системы. Представление систем управления в виде функциональных схем позволяет анализировать различные по физической сущности системы с позиций ряда общих требований. Независимо от назначения системы, физической природы ее отдельных частей, их конструктивного исполнения функциональная схема системы управления в общем виде может быть представлена как совокупность следующих функциональных элементов (рис. 1.3): УЭ - управляющий (задающий) элемент; СУ - суммирующее устройство; КУ - последовательное корректирующее устройство; У - усилительный элемент; ИЭ - исполнительный элемент; мое - местная обратная связь; ОУ - объект управления; ГОС - главная обратная связь. мое (г хеш
|
 Как выбрать диван  История мебели  Стили кухонной мебели  Публикации  Инверторы  Приемники |






