
|
|
|
Главная » Дистанционное управление моделями 1 ... 11 12 13 14 15 16 17 ... 28 пится изнутри к верхней стенке корпуса передатчика с помощью винтов М2. На ось ручки управления насаживается также и рукоятка. Тому, кто намерен работать с передатчиком, держа его в руках, следует применять короткие рукоятки, которыми легко манипулировать с помощью больших пальцев обеих рук (рис. 124, а). Если передатчик висит на ремне, упираясь задней стенкой в живот, работу с ним и четкое управление моделью облегчают длинные рукоятки (рис. 124, б). Пропорциональное дистанционное управление Принцип . . . Рассмотрев более внимательно изготовленные пропорционг------- управления пропорционального блоки системы дистанционного управ- ления, мы заметим, что датчик канальных импульсов, используемый как прибор для испытания сервосистемы, способен вырабатывать импульсы любой длительности от 1,0 до 2,2 мс, тогда как переключающий усилитель обеспечивает переключение только при двух вполне определенных длительностях импульсов. Эти длительности можно регулировать, однако в процессе эксплуатации они уже не меняются, откуда следует, что управлять мы можем только командами Включить и Выключить . Ясно, что двух этих команд недостаточно даже для управления ходовым двигателем. Совершенно аналогичная картина возникает и при управлении автомоделью, которая может ездить только прямо или по кругу с вполне определенным радиусом кривизны. Очевидно, что подобная езда - не более чем слабое подражание движению прототипа. Таким образом, мы подошли к естественному выводу о необходимости не просто подавать с помощью системы дистанционного управления команды на включение и выключение какого-либо исполнительного механизма, но и менять величину управляющего воздействия между нулем (соответствует, например, нейтральному положению) и максимумом (например, максимумом угла отклонения руля). При повороте на некоторый определенный угол движка на корпусе передатчика или при отклонении на тот же угол соответствующего рычажка должен пропорционально меняться и угол поворота руля на модели, причем, будучи повернутым на заданный угол, руль должен оставаться в этом положении. Иными словами, угол поворота руля должен изменяться пропорционально углу установки управляющего органа на передатчике. Системы дистанционного управления, основанные на таком принципе, называются пропорциональными. Для дистанционного управления моделями в настоящее время применяют исключительно пропорциональные системы. Для многофункционального дистанционного управления (когда, например, обеими руками осуществляется одновременное дистанционное управление сразу четырьмя функциями модели) необходимо изготовить сложную комбинированную сервомеханическую систему. Одна следящая система позволяет осуществлять одновременное и пропорциональное управление двумя функциями. С помощью двух следящих систем можно уже точно управлять положением модели в пространстве (по трем координатам) , а также ее скоростью. Воздушная модель, например, могаа бы при этом вьшолнять фигуры высшего пилотажа. Используя возможности современной электроники, построим устройство дистанционного управления по семи каналам. Шесть из них будут пропорциональными, а один переключающим. Для удобства работы каналы следует заранее пронумеровать. Однако работать они должны все одновременно, поэтому в принципе безразлично, какому каналу будет присвоен тот или иной номер. Так, например, можно 1-й и 7-й каналы использовать для дистанционного управления движением модели, а каналы с 3-го по 6-й оставить незадействованными или управлять с их помощью некоторыми другими функциями, а то и вообще другой моделью. Теоретически вполне возможно сконструировать систему дистанционного управления и на большее число функций, однако практической необходимости в этом нет. Термин ручка управления позаимствован в технике дистанционного управления моделями у планеристов. Тот, кому доводилось заглянуть в кабину планера, а то и посидеть в ней, знаетчто такое настоящая ручка управления. На нашем передатчике ручка управления - это маленький рычажок. Тем не менее с ее помощью осуществляются те же самые две функции, что и на планере: управление рулями высоты и направления. Вернемся, однако, к электронике. Подумаем о том, как преобразот вать канальные импульсы переменной длительности в некую пропорциональную установочную величину (угол, путь или силу). Переключающее устройство, преобразующее канальный импульс в соответствующую установочную величину, ранее называлось рулевой машинкой, в >новой же литературе кратко именуется серво. Этот термин из области техники управления означает не что иное, как вспомогательная машина (например, серводвигатель - это вспомогательный двигатель). Сервоэлектроника состоит из следующих блоков: генератора опорных импульсов, каскада сравнения, усилителя и серводвигателя (рис. 125). Серводвигатель соединяют с потенциометром через редуктор. В принципе все электронные функциональные блоки нам уже знакомы по переключающему усилителю. С помощью структурной схемы попробуем разобраться, что же в ней следует регулировать, чтобы получать переменные установочные величины. Демпщробанае
со среанш дыдодом JL Генератор Каскад Усипитепь Серводвигатель опорных сравнения импульсов Рис. 125. Структурная схема сервоэлектроники. Генератор опорных импульсов, как и раньше, запускается канальным импульсом и генерирует эталонный опорный импульс, который сравнивается затем в каскадах сравнения с канальным. Остаточный импульс управляет усилителем. К выходу усилителя подключен серводвигатель, который в зависимости от команды должен вращаться в ту или другую сторону. Вращаясь, например, по часовой стрелке, он (через редуктор) меняет сопротивление потенциометра опорного генератора таким образом, чтобы длительность опорного импульса 1о„ постепенно менялась в сторону сближения с длительностью канального импульса tn- Остаточный импульс как результат сравнения опорного и канального импульсов постепенно становится все короче, а при равенстве этих импульсов просто ликвидируется, и серводвигатель останавливается в данном положении. Таким образом, сервоэлектроника в целом осуществляет процесс регулировки как следящий усилитель. Для того чтобы процесс регулировки протекал быстро, но без качаний, в схеме предусмотрено эффективное демпфирование (гашение колебаний). Сервоэлектроника принципиальной схеме сервоэлектроники пропорц^юнальную (РИ- -б) мы сразу узнаем уже знакомые информацию из нам элементы. Генератор опорных импульсов канального импульса И каскад сравнения ничем не отличаются от та- ковых в схеме переключающего усилителя. Растяжка импульса на выходе каскада сравнения осуществляется с помощью конденсатора С^,. Усилитель состоит из двух ветвей: на транзисторах Ts, T-J к Tf Tg соответственно. При положительном растянутом остаточном импульсе в точке 3 (см. также рис. 76 и 77) проводят только транзисторы и T-J 1л двигатель вращается в одну сторону, при отрицательном же остаточном импульсе проводят транзисторы Т(, к и двигатель вращается в другую сторону. Поэтому двигатель подключается к среднему выводу 2,4 В батареи приемника. Если в точке 2 нет остаточного импульса (кан^оп). базэ гранзисюра Тз оказывается подключенной к плюсу (через 12), а база транзистора Г4 - к минусу (через 13) и оба транзистора заперты. Напряжение в точке 3 будет при этом равно половине напряжения источника питания, в результате чего транзисторы Ts и Tf, будут открыты, а Г7 и Т заперты. Ток через двигатель вследствие этого не протекает, и двигатель не вращается. Транзисторы T-j, 7*8 и обе ветви батареи образуют мостик, в диагональ которого включен двигатель. Если длительность импульса, поступающего на вход, изменится, то процесс регулирования будет развиваться следующим образом. Управляющий сигнал запускает ждущий мультивибратор. Оба сигнала сравниваются в точке 2, в результате чего выделяется соответствующий остаточный импульс. Если он положительный, то открывается транзистор Г4, а значит, и транзистор Tf транзистор же Т^ запирается. В результате этого отпирается транзистор 77, а остается запертым, и, таким образом, ток может протекать теперь по контуру, состоящему из транзистора Т- двигателя и источника питания. Двигатель начинает вращаться и перемешает подвиж- Генератор опорных импульсов Иаскад сравнения Серводвигатель 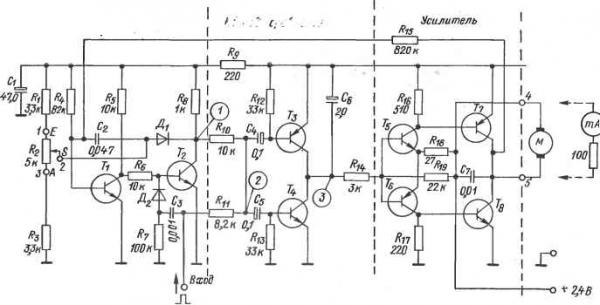 Рис. 126 Принципиальная схема сервоэлектроники. 7 Т^, Т^,Т^ - транзисторы TUNj Т^,Т^ - транзисторы TUI Tj - германиевый р-и-р-транзистор типов GC511, АС188 и др.; / j - германиевый и-р-и-транзистор типов CjC521,AC187 и flp.j Д^.Д, - диоды DUS, 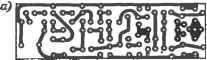 Рис. 127. Печатная плата (л) и схема расположения элементов (б) сервоэлектроники. 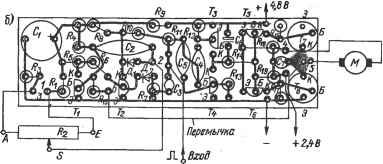 ный контакт потенциометра 2 До тех пор, пока длительность опорного импульса не сравняется с длительностью канального. Тогда эти импульсы взаимоуничтожатся в точке 2 и мост снова окажется в состоянии равновесия. Мотор остановится. В рассмотренном случае (положительный импульс) канальный импульс был длительнее опорного. Если канальный импульс короче опорного, подобный же процесс будет протекать в другом плече моста. Может случиться, что двигатель будет совершать качания , проходя через положение, заданное командой. Подвижный контакт потенциометра 2 сдвигается при этом значительно дальше заданного положещя. Больше, чем требуется, изменяется и длительность опорных импульсов. В результате этого процесс регулирования будет идти в обратном направлении и рулевой исполнительный механизм постоянно будет совершать колебания относительно заданного положения. Все это приведет к ускоренному  Рис. 128. Монтаж сервоэлектроники.  ® -сверление 03мм  Рис. 129. Сервомеханизм: а - вид сбоку, б - вид сверху; в - образец. разряду батареи и преждевременному - износу редуктора. Контрмерой против этого является введение 3jieKTpoHHoeo демпфирования. По цепи обратной связи, через /и, часть напряжения моста подается на генератор опорных импульсов, в результате чего двигатель замедляет вращение на подходе к положению покоя, т. е. определенным образом тормозится (демпфируется). Демпфирование действует только в процессе разгона или выбега серводвигателя, не оказывая влияния на скорость его вращения и на угол отклонения руля. На рис. 127 показаны печатная плата и схема расположения элементов, на рис. 128 - монтаж сервоэлектроники. Мы строим сервомеханизм При монтаже механической части пропорциональной системы автоматического регулирования мы сталкиваемся с теми же проблемами, что уже возникали при работе с рулевыми машинками. Двигатель следящей системы является одним из важнейших ее узлов. Уже при 2,4 В он должен надежно разгоняться и развивать полное усиление перекладки руля. Воспользуемся теми же типами двигателей, что входят в состав покупных следящих систем. Они в достаточной степени удовлетворяют всем требованиям и гарантируют надежную работу. Рассмотрим в качестве примера одну хорошо зарекомендовавшую себя конструкцию. Серворедукгор должен иметь между валом двигателя и осью потенциометра передаточное отношение в пределах от 300:1 до 400:1. Передаточное отношение никак не отражается на работоспособности схемы, оказывая, однако, влияние на прилагаемые установочные усилия и время установления движка потенциометра в нужное положение. Таким образом, путем выбора этого отношения мы можем подгонять в определенных пределах сервомеханизм к заданным условиям эксплуатации. Детали механической конструкции показаны на рис. 129. Шестерня двигателя  Рис. 130. Сервомеханизм Servo-matic 15 Prop : с - в кожухе; б - без кожуха.  имеет 11 зубьев. Шестерни, насаженные на оси I, 2, 3, 4 редуктора имеют соответственно 68/14, 44/14, 44/14, 44/10 зубьев. Шестерня, насаженная на вал 5 потенциометра, имеет 56 зубьев. Сервомеханизмы с передаточным числом 1:1000 рассчитаны на значительные установочные усилия. При необходимости один редукторный каскад (ось .?) можно удалить. Понятно, что в этом случае придется изменить также и позиции осей 4 и 5. Особое внимание следует уделить тому, чтобы редуктор при максимально возможной легкости хода работал без люфтов. Зубчатые колеса купим в магазине типа Юный техник или Умелые руки . Однако, если самостоятельная сборка окажется чересчур трудной, следует всю механическую часть приобрести в комплекте (рис. 130). В этом случае электронную часть следящего устройства можно собирать отдельно от механической, а размещать ее в общем корпусе с приемником. Данный вариант обладает еще и тем преимуществом, что недорогими механическими устройствами мы можем снабдить сразу несколько моделей, переставляя с одной на другую в случае необходимости только приемник. Настройка электронной Прежде всего проконтролируем потребление следящей системы тока при подключенном серводвигателе и по- даче на вход системы канальных импульсов. Прибор должен показать при этом /jnin 1 >5 мА (двигатель в состоянии покоя), maxlSO мА (двигате^1ь вращается). Если нри безупречной работе усилителя вал серводвигателя постоянно разворачивается на предельный угол, то следует либо изменить полярность подключения двигателя, либо поменять местами выводы EviA потенциометра. При исправно работающей следящей системе направление перехода в нейтральное поло- жение можно менять по желанию путем одновременного переключения выводов двигателя и потенциометра. В процессе настройки нам пригодится испытатель сервосистемы. Установка нейтрального положения следящей системы. В начале этого этапа настройки развернем корпус потенциометра К2 (см. рис. 126) так, чтобы его подвижный контакт находился примерно в среднем положении. Для удобства контроля на ось потенциометра нанесем метки. Путем подбора параметров электронной следящей системы (К Кг, Кз, /4 и С2) установим требуемую длительность опорных импульсов. При дальнейшей настройке правильно отрегулированная следящая система служит в качестве эталонной. С ее помощью устанавливают в среднее положение каждый канал передатчика и регулируют пределы изменения длительности командных импульсов, добиваясь полного угла отклонения исполнительного механизма следящей системы. При изготовлении других следящих систем следует добиваться того, чтобы их электромеханические постоянные времени были такими же, как у эталонной системы: при соблюдении этого условия все они будут взаимозаменяемыми. Для грубой настройки вновь передвинем подвижный контакт потенциометра Кг в среднее положение. Если при подаче канального импульса положение подвижного контакта существенно изменится, вместо резистора К4 следует включить в схему потенциометр (100 кОм) и регулиро- вать его сопротивление, пока следящая система не окажется точно в нейтральном положении. Тогда, замерив- сопротивление потенциометра, следует заменить его близким по номиналу постоянным резистором (на рис. 126 82 кОм). Точной установки нейтрального положения добиваются путем разворота корпуса потешдаометра Kj- При желании изменить предельные углы перекладки руля следует менять значения К, и /2- Установка демпфирования Если рулевой сервомеханизм совершает колебания относительно нейтрального положения или подходит к этому положению слишком медленно (что соответствует слишком слабому или слишком сильному демпфированию), то следует установить оптимальную величину демпфирования путем подбора сопротивления резистора ft, s. Для этого заменяем вначале И15 цепочкой из последовательно включенных потенциометра (1 МОм) и постоянного резистора (470 кОм). После окончания настройки сопротивление цепочки замеряем и заменяем цепочку ближайшим по номиналу постоянным резистором. Величину демпфирования устанавливаем такой, чтобы следящая система переходила в заданное положение быстро, без избыточного качания. При настройке отремонтированной или вновь изготовленной следящей системы очень хлопотно каждый раз вынимать приемник из модели и запускать всю систему дистанционного управления. Настройка следящей системы существенно упростится, если проводить ее, отделив эту систему от остальной схемы устройства дистанционного управления, с помощью испытателя сервосистемы. Далее перейдем к изготовлению печатной платы для усилителя следящей системы и перенесем на нее все элементы с экспериментальной платы. После визуального контроля всех конструктивных элементов и мест паек переходим к проверке работоспособности схемы. Дополнительной подстройки, как правило, не требуется. При настройке на экспериментальной плате можно также подогнать пределы изменения установочного угла сервосистемы применительно к условиям конкретной модели. С увеличением Ri к Н3 предельные значения установочного угла уменьшаются, и наоборот. Как правило, установочный угол должен изменяться в пределах ±45°, однако в особых случаях может потребоваться увеличение этих пределов до ±90°. Электронная следящая система является по существу переключающим устройством для выработки малых пропорциональных регулирующих отклонений, как это имеет место, например, при перекладке руля. Теперь нам нужно еще и переключающее устройство, с помощью которого можно было бы управлять большими мощностями или усилиями на протяженных путях регулирования (например, при обслуживании парусов). Пропорционально Дпя указанной выше цели можно восполь- управлять можно и зоваться уже изготовленным переключающим рГлюГк,и.его усилителем (см. рис. 76, 83-85). Ранее он усилителя служил для включения и выключения ходово- 10 двигателя самоходной тележки. Теперь он должен осуществлять электронное управление парусной лебедкой нашей парусной яхты. Переключательные функции будут здесь пропор- циональными, если потеншометр Kj соединить через редуктор с валом двигателя. Тогда при взаимодействии сервоэлектроники, переключающего усилителя и двигателя возникнет процесс регулировки, подобный описанному для электронной следящей системы. С помощью реле f Р2 можно включать существенно более высокие мощности. Этот вариант целесообразно использовать для управления парусными лебедками. Если регулировкой канального потенциометра изменить длительность канальных импульсов, то одно из реле сработает. Двигатель лебедки будет вращаться до тех пор, пока опорные импульсы не сравняются по длительности с канальными, а длина выборки шкота не станет пропорциональной отклонению ручки управления; Достаточно мощный двигатель и соответствующее расположение редуктора могут обеспечить значительные усилия, требуемые для управления парусами. Пропорциональное управление обладает еще и тем преимуществом, что угол атаки паруса всегда пропорционален положению ручки управления на передатчике, С помощью переключающего усилителя к двигателю должны подводиться довольно значительные токи, поэтому и реле для него следует выбирать соответствующих типов. В моделях судов подыскать место для дополнительной печатной платы не составляет особого труда. Перед окончательным монтажом эту схему также следует опробовать на экспериментальной плате. Настройка ограничивается исключительно юстировкой потенциометра Нг- Если с помощью переключающего усилителя предполагается управлять парусной лебедкой, то его настройку надо производить при подключенной лебедке. При эксплуатации парусной лебедки потенциометр связывают с двигателем через редуктор, а не монтируют их вместе на общей печатной плате. Если мы намерены использовать переключающий усилитель и для других целей, то двигатель парусной лебедки и потенциометр следует подключать к усилителю с помощью пятиполюсного штекера. Однако, как правило, переключающий усилитель работает исключительно на и<фусную лебедку. Поэтому более целесообразно раму парусной лебедки делать с таким расчетом, чтобы на ней можно было расположить и закрепить и корпус переключающего усилителя (см. рис. 85). Парусная лебедка подключается к переключающему усилителю в соответствии с рис. 76. Следующий этап - В Ходе технического развития электроника сервоэлектроника на систем дистанционного управления постепенно интегральных схемах , оформилась в самостоятельную ветвь любительской электроники. Используя творческую мысль и богатый опыт любителей, промышленность получила возможность наладить массовый выпуск устройств дистанционного управления, отвечающих самым высоким требованиям современных стандартов. В результате этого дистанционное управление моделями стало доступно не только конструкторам-любителям, но и тем, кто не изъявляет желания заниматься самостоятельным изготовлением электронных приборов. Высокая насыщенность современных электронных приборов деталями явилась предпосылкой к созданию новых специальных конструктивных элементов. Развитие элементной базы можно проследить и на примере
|
 Как выбрать диван  История мебели  Стили кухонной мебели  Публикации  Инверторы  Приемники |
|||||||||||||||||






